



Pittman BGE6050无刷电机驱动器是一款设计用于速度、转矩和位置模式的大四象限伺服控制器。驱动器可以作为独立的运动控制器运行,也可以作为CANopen网络中的从站设备运行。驱动器可以在10 - 60 VDC的版本中运行,持续电流可达20 Arms。
规格 +
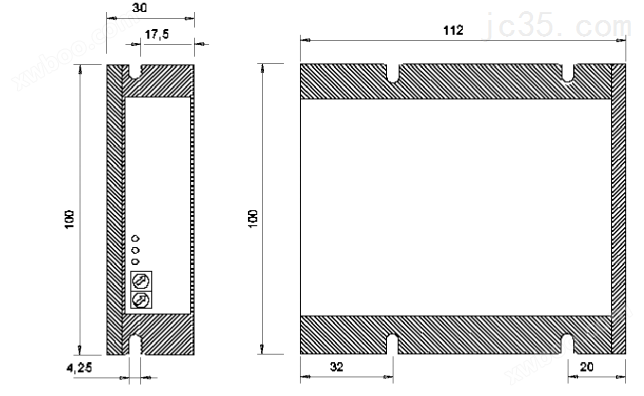
零件号 单位 BGE6050 电压范围 VDC 10至60V直流 连续输出电流 A 20 A rms 峰值输出电流 A 50 A 数字输入 5 数字输出 1 模拟输入 1(0至+10V) 通信 CANopen 转矩模式 是 速度模式 是 位置模式 是 尺寸 mm 100 x 112 x 30 尺寸图 +
连接表 +
X1连接器 - 电源和电机 引脚编号 符号 描述 1 PE 接地 2 +UP 电源 3 GND 电源接地0V 4 Ma 电机接头A 5 Mb 电机接头B 6 Mc 电机接头C X2连接器 - 霍尔传感器和编码器 引脚编号 符号 描述 1 H1 霍尔传感器1 2 H2 霍尔传感器2 3 H3 霍尔传感器3 4 A 增量编码器通道A 5 B 增量编码器通道B 6 INX 增量编码器索引通道 7 +UH 电源霍尔/编码器+5V 8 /H1 霍尔传感器1反转 9 /H2 霍尔传感器2反转 10 /H3 霍尔传感器3反转 11 /A 增量编码器通道A反转 12 /B 增量编码器通道B反转 13 /INX 增量编码器索引通道反转 14 GND 电源霍尔/编码器接地0V X3连接器 - 模拟和数字I/O 引脚编号 符号 描述 1 +UE “电子设备电源" 2 +AIN 0/DIN4 +模拟输入/数字输入4 3 DIN 0 数字输入0 4 DIN 1 数字输入1 5 DIN 2 数字输入2 6 DIN 3 数字输入3 7 预留 预留引脚 8 -AIN 0 模拟输入 9 DOUT 0 数字输出0 10 CAN_HI CAN高 11 CAN_LO CAN低 12 CAN_GND CAN接地 下载 +









所有评论仅代表网友意见,与本站立场无关。