



产品介绍:
强有力的高速六个轴机器人对许多是理想的应用。 • 12 kg腕子酬载和在膀臂(10 kg)的另外的安装面,使能复杂抓爪工具的综合化舒适,不用妥协的表现。 • 改进的机器人工作空间以1,440 mm水平的伸手可及的距离和2,511 mm垂直的伸手可及的距离为特色。 大工作信封在机器人之后延伸,允许机器人工具存贮或维护的空间。 • 空心膀臂提供优选的缆绳防护,当提高使用的可靠性时。 在腕子的一个50 mm通过孔附寄缆绳并且保护它免受穿戴、干涉或者粗磨。 • 新,塑造外形的胳膊设计减少与装置、零件或者机械的干涉。 • 给予的双重轭膀臂设计提供另外的力量在不受欢迎的崩溃的情况下保护胳膊。
特点:
强有力的高速六个轴机器人对许多是理想的应用。 • 12 kg腕子酬载和在膀臂(10 kg)的另外的安装面,使能复杂抓爪工具的综合化舒适,不用妥协的表现。 • 改进的机器人工作空间以1,440 mm水平的伸手可及的距离和2,511 mm垂直的伸手可及的距离为特色。 大工作信封在机器人之后延伸,允许机器人工具存贮或维护的空间。 • 空心膀臂提供优选的缆绳防护,当提高使用的可靠性时。 在腕子的一个50 mm通过孔附寄缆绳并且保护它免受穿戴、干涉或者粗磨。 • 新,塑造外形的胳膊设计减少与装置、零件或者机械的干涉。 • 给予的双重轭膀臂设计提供另外的力量在不受欢迎的崩溃的情况下保护胳膊。
特点:
流线型手臂设计,扩大动作范围
全轴低功率输出,无需设置安全栅栏,设备构成简易
适合短距离作业
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:只限搬运用途。
*5:超过1KG的情况因动作范围有异。请根据对应的负载使用正确的动作范围。
*6:MH6F的时候是1.0kVA。
*7:HP20F的时候是1.5kVA。
*8:斜线部分表示的是S轴在-40° ~ +30°的时候P点无法动作的范围。
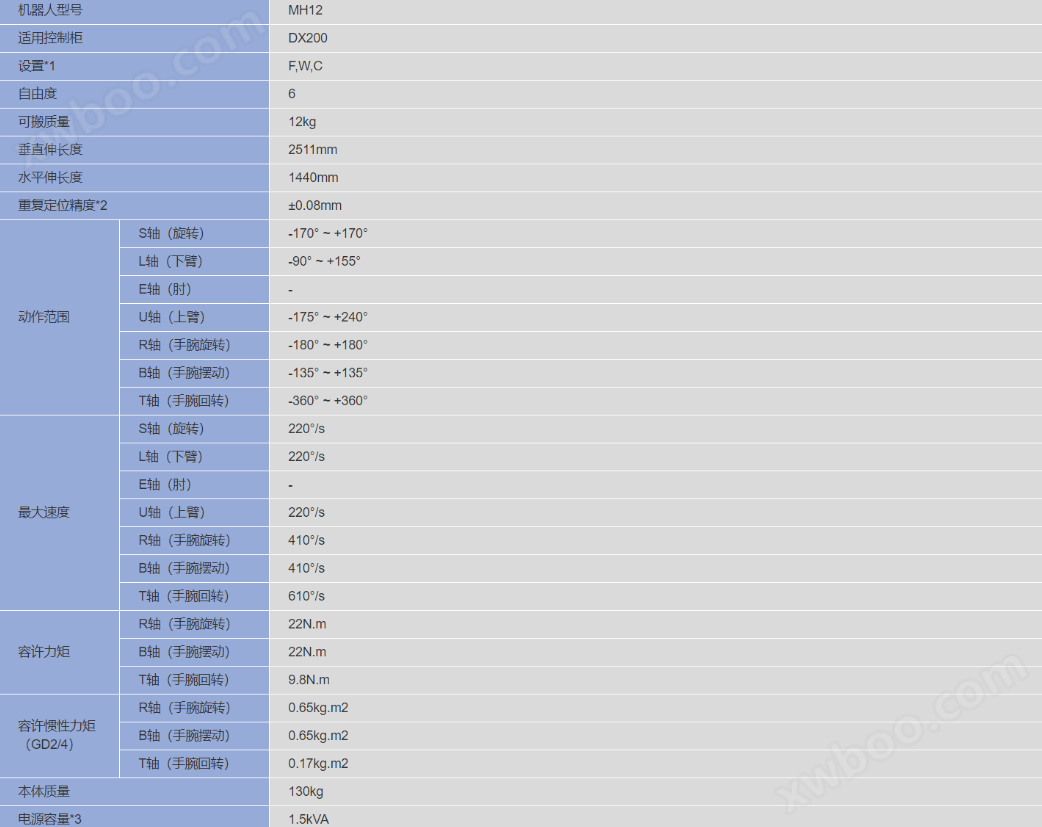
产品参数
Parameter
负载12KG
重复定位精度:0.08mm
水平伸长度:1440mm
垂直伸长度:2511mm
本体质量:130KG
电源容量:1.5KVA
所有评论仅代表网友意见,与本站立场无关。