
1.1 传统的伺服系统框架
传统的伺服系统框架中,伺服驱动没有独立的信号处理和控制能力,系统控制核心需要接收伺服驱动部分反馈的反馈信号,进行处理后再根据要求向伺服驱动部分给出控制量,同时控制核心还需要处理系统中其他的设备信号,硬件结构相对简单,成本相对低,但控制核心的工作负担非常重,无法保证系统工作的实时性和稳定性。
1.2 本多(Bend)伺服系统框架
针对传统伺服系统框架中的缺陷,本多(Bend)伺服驱动器具有独立的控制核心,以具备高速数字信号处理能力的DSP芯片为核心处理器,伺服驱动器能独立完成底层驱动模块的控制,利用DSP的信号处理能,在伺服驱动器上就能实现各种复杂的运动算法,独立规划运动控制轨迹,并且能针对不同的电机自适应调节部分闭环控制参数。上层系统总控制器无需处理底层反馈数据,只需通过通用通讯接口发送控制命令即可完成对伺服驱动器的控制,可极大地减轻系统总控制器的负担。使用上也非常方便,通过随驱动器带的PC层软件对驱动器进行参数配置之后便可接入系统通讯网络中使用。
2 ,驱动器电路需求分析及方案设计
根据模块化、结构化、开发式的设计思想,结合电磁兼容性、抗干扰方面的考虑,将硬件系统分为主控制电路与电源驱动电路两大部分,尤其对于高压驱动器则分别在两个PCB板上布置,两板之间通过板对板接插件对接。信号电路与电源及驱动电路分离,可极大地降低驱动电路对信号电路的干扰。同时,可通过使用不同的驱动电路实现适于不同功率电机的适应。
3 运动控制器硬件设计
根据前述的总体方案设计,结合EMC电磁兼容性、抗干扰方面的考虑,将高压驱动器硬件系统分为主控制电路与电源驱动电路两大部分,分别在两个PCB板上布置,两板之间通过板对板接插件对接。信号电路与电源及驱动电路分离,可极大地降低驱动电路对信号电路的干扰。同时,可通过使用不同的驱动电路实现适于不同功率电机的适应。
硬件系统整体划分为信号板与电源/驱动板两块PCB板。
信号板为控制处理核心,接收处理来自上位机的CAN/RS232控制指令;接收处理电源/驱动板反馈电压电流及温度数据;接收处理旋转编码器信号;通过PWM口和IO口给出对驱动电机的驱动信号;通过LED指示系统工作状态;通过CAN/RS232反馈状态及数据给上位机控制系统。
电源/驱动板负责电源管理和电机驱动,隔离转换驱动电源为信号板提供稳定的供电,接收来自信号板的PWM口和IO口给出的驱动信号,放大并驱动电机工作,反馈驱动电源电压、驱动电流、温度及状态给信号板。

4 运动控制器算法设计
4.1 PID控制算法
在工程实际中,应用*为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能掌握,或得不到**的数学模型时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术*为方便。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
4.2 PID控制算法的数字实现
PID算法已经内嵌在本多伺服驱动器中,用户只需要根据自己的需求在软件中填入参数,轻松实现数字环,位置环和电流环的控制。
5 运动控制器软件设计
软件系统总体分三层结构:通讯层,控制/调节层,驱动/反馈层。
通讯层接收控制命令,更新控制参数数据结构,驱动反馈层反馈运动控制状态和系统状态并更新运动控制数据和系统状态数据,控制/调节层根据控制参数数据结构中的数据和反馈的状态数据进行控制和指示。
5.1 通讯层
主要包含CAN接口通讯和RS232异步串行通讯两大通讯模块。完成驱动器与上位机的通讯,包括接收上位机的控制命令,完成系统控制参数的更新,及部分命令的执行,接收上位机的参数配置命令,完成系统属性配置,接收上位的查询命令,查询相应的数据结构取得反馈数据反馈给上位机。
5.2 控制/调节层
主要包含系统定时模块、状态IO指示、故障处理、控制参数EEPROM存取、位置环PID、速度环PI、电流环PID这七大模块。主要完成以下任务:根据控制结构数据的设定和系统运动状态的反馈完成运动控制的位置环、速度环、电流环三环控制和模式切换;根据系统状态执行系统工作状态指示和故障处理。
5.3 驱动/反馈层
主要包含旋转编码器正交编码信号读取模块、电机控制20KHz PWM输出模块、电枢电流采样模块、温度/电压/失控监测及反馈模块。主要完成系统温度、电压、电流的监控;处理QEI数据完成运动控制速度和位置的反馈,对电枢电流采样完成电枢电流的反馈,产生20KHz电机控制PWM完成对电机的运动控制。
6 结语
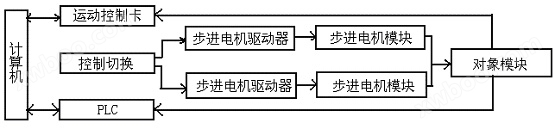
实际运用中,需要根据实际系统的要求,将PC上位机的软件,运动控制卡以及电机驱动系统相结合,根据不同的工况需求对运动轨迹进行设定,以达到稳定应用的目的。






所有评论仅代表网友意见,与本站立场无关。