
隐藏全部内容
PC/104 控制器
PMAC2A PC/104是一款结构小巧、功能强大、性能价格比突出的4轴或8轴嵌入式控制系统,更是一种柔性的、可靠的解决方案。
PMAC2A PC/104控制器可以直接用于模拟量伺服式或脉冲加方向步进式驱动控制。使用可选的插在基板上的附件板,
可以支持USB2.0 或 Ethernet高速通讯,数字I/O(使用Opto-22接口),控制额外的5-8扩展轴以及高性能直接PWM纯数字控制。
此外,PMAC2A PC/104可以通过104总线与上位机通讯,也可以使用双端口RAM提高总线的通讯速度,脱机独立工作时,
还可以使用RS-232或者RS-422串口,USB2.0和以太网通讯,非常灵活。
硬件特点:
• 40 MHz DSP563xx CPU;
• 128k x 24 零等待SRAM;
• 512k x 8 flash memory 用于固件和用户备份;
• 2k x 8 EEPROM memory 用于参数备份;
• 版本的固件;
• RS-232/422 串口,PCI (PC) 总线接口;
• 4轴通道接口电路,每一个包括:
• 在板模拟量±10V(12位)输出;
• 在板脉冲加方向输出;
• 3路标准编码器输入;
• 四个标志信号输入(限位,回零,报警等),两个标志信号输出(使能等);
• 通用I/O,可扩展I/O;
• 高精度时钟+/-100 ppm;
• PID/馅波/前馈伺服算法。
软件特点:
运动轨迹规划
• 支持S曲线加减速的直线插补;
• 支持S曲线加减速的圆弧插补;
• 点到点快速运动;
• 三次样条插补模式spline;
• 三次隐式样条插补Hermite-spline (PVT);
• 自动硬件捕捉/触发功能;
• 交互式手动运动;
• 可选择的运动提前预算lookahead。
伺服特点
• 独立的数字PID反馈滤波;
• 速度前馈,加速度前馈,摩擦力前馈;
• 2路陷波滤波器;
• PID参数可随时任意改变;
• 可编程的极限输入,输出;
• 可选择的多级点伺服算法。
换相特色
• 交流伺服电机的正弦换相
• 交流感应电机的矢量控制
• 数字电流环
补偿特色
• 位置补偿列表(1D & 2D);
• 力矩补偿列表;
• 反向间隙补偿;
• 刀具半径补偿。
安全特色
• 硬件的和软件的行程极限;
• 放大器使能/报警交换信号;
• 跟随误差警告极限;
• 整合电流极限;
• 编码器计数损失报警(某些版本);
• Watchdog 报警计时器;
• 程序和通信校验。
计算特色
• 实时多任务系统;
• 48位浮点数编程;
• 三角函数和超越函数;
• 自动匹配不同的变量类型。
• 可以使用的反馈形式
• 数字积分编码器;
• 正弦编码器;
• 旋转变压器;
• 电位计;
• LVDTs,RVDTs;
• 并行数字编码器;
• MLDTs;
• 串行编码器(例如:SSI)。
笛卡儿坐标系特色
• 用户自定义的笛卡儿坐标系;
• 可分离运行程序的坐标系;
• 支持多个电机的坐标系;
• 轴空间的转化(例如:坐标系偏置,旋转,镜像);
• 电子齿轮(不是编程必须的);
• 电子凸轮(需要编程支持)。
运动程序特色
• 高级程序语言;
• 自动按顺序执行运动;
• 使用用户工程单位编程;
• 运动的值可以是公式,也可以是常量;
• 自动匹配坐标系里的各轴,
• 支持G代码,和代码扩展。
PLC程序特色
• 与运动程序异步;
• 象硬件PLC一样控制I/O;
• 脱机运行时,作为支持平台;
• 安全和状态监视;
• 伺服比例行程安排;
• 数据报告功能;
• 可使用控制器的全部寄存器。
Turbo PMAC Clipper控制器
Turbo PMAC Clipper(Turbo PMAC2 Eth-Lite) 是一款具备全部Turbo PMAC 特征的,
设计用于对成本敏感的应用的多轴运动控制器。这种功能强大的,
但是又同时具备结构紧凑和优点的多轴运动控制器,
标准版本即带有Ethernet 以太网和 RS232 通讯接口以及内置 I/O。
Clipper 控制器不仅采用了一颗完整的Turbo PMAC2-CPU ,
而且提供了一个四轴伺服或步进控制加32个数字I/O 点的最小配置,
控制轴数和I/O还可以扩展。
硬件特征
• 80 MHz DSP56303 Turbo PMAC CPU;
• 256k x 24 用户SRAM;
• 1M x 8 flash memory 用于固件和用户备份;
• 采用发布的固件版本;
• RS-232串口;
• 100Mbps EtherNet 以太网接口;
• 4通道轴接口电路,每一个包括:
• 在板12位±10V模拟量输出;
• 在板脉冲加方向数字输出;
• 3路标准差分/单端编码器信号输入;
• 5个标志信号输入(限位,回零,报警等),2个标志信号输出(使能等);
• UVW TTL-level “霍尔"输入;
• 50-pin IDC 插头用于放大器/编码器接口
• 34-pin IDC 插头用于标志信号接口
• 4-pin Molex 插头用于电源输入(5V, +/-12V, GND)(+/-12V 只用于需要模拟量输出或输入时)
• PID/陷波/前馈伺服算法。
• 在板提供32个通用的TTL-等级I/O点:
• 16点多路复用器端口,兼容Delta Tau I/O附件
• 16点“opto"端口,兼容OPTO 22形式的I/O模块
• 两个手轮端口,每一个:
• 支持正交编码器输入;
• 支持脉冲频率调制PFM或脉冲宽度调制PWM脉冲对输出。
软件特征
运动轨迹规划
• 支持S曲线加减速的直线插补;
• 支持S曲线加减速的圆弧插补;
• 点到点快速运动;
• 三次样条插补模式spline;
• 三次隐式样条插补Hermite-spline (PVT);
• 自动硬件捕捉/触发功能;
• 交互式手动运动;
• 可选择的运动提前预算lookahead。
伺服特性
• 独立的数字PID反馈滤波;
• 速度前馈,加速度前馈,摩擦力前馈;
• 2路陷波滤波器;
• PID参数可随时任意改变;
• 可编程的极限输入,输出;
• 可选择的多级点伺服算法。
换相特性
• 交流伺服电机的正弦换相
• 交流感应电机的矢量控制
• 数字电流环(使用PWM输出时)(只适用PMAC2)
补偿特性
• 位置补偿列表(1D & 2D);
• 力矩补偿列表;
• 反向间隙补偿;
• 刀具半径补偿。
安全特性
• 硬件的和软件的行程极限;
• 放大器使能/报警交换信号;
• 跟随误差警告极限;
• 整合电流极限;
• 编码器计数损失报警(一些版本);
• Watchdog 报警计时器;
• 程序和通信校验。
计算特性
• 实时多任务系统;
• 48位浮点数编程;
• 三角函数和超越函数;
• 自动匹配不同的变量类型。
可以使用的反馈形式
• 数字积分编码器;
• 正弦编码器;
• 旋转变压器;
• 电位计;
• LVDTs,RVDTs;
• 并行数字编码器;
• MLDTs;
• 串行编码器(例如:SSI)。
笛卡儿坐标系或者主/从特色
• 用户自定义的笛卡儿坐标系;
• 可分离运行程序的坐标系;
• 支持多个电机的坐标系;
• 轴空间的转化(例如:坐标系偏置,旋转,镜像);
• 电子齿轮(不需要编程);
• 电子凸轮(需要编程支持)。
运动程序特性
• 高级程序语言;
• 自动按顺序执行运动;
• 使用用户工程单位编程;
• 运动的值可以是公式,也可以是常量;
• 自动匹配坐标系里的各轴,
• 支持G代码,和代码扩展。
PLC程序特性
• 与运动程序异步;
• 与硬件PLC一样控制I/O;
• 脱机运行时,作为支持平台;
• 安全和状态监视;
• 伺服比例行程安排;
• 数据报告功能;
• 可使用控制器的全部寄存器。
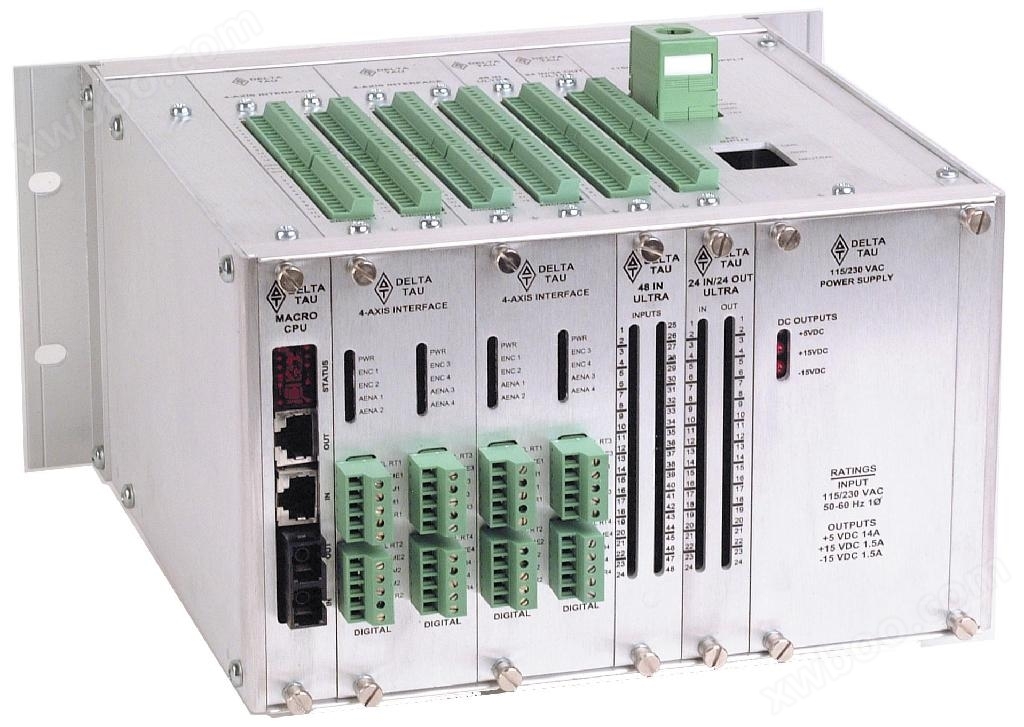
UMAC 控制器
UMAC 特点
UMAC是一种由一套3U结构的欧洲标准卡组成的模块化Turbo PMAC2 系统级控制器。各种可用附件,
有可以直接PWM输出或典型的+/- 10V 以及脉冲加方向信号输出的轴板,I/O板,现场总线接口板,
通信接口(USB2.0,以太网等)和其它任何接口板。UMAC类型的附件板安装在3U机架里,
与可供选择的电源和可选的3U伺服放大器构成了完整的系统。
软件特性
运动轨迹规划
• 支持S曲线加减速的直线插补;
• 支持S曲线加减速的圆弧插补;
• 点到点快速运动;
• 三次样条插补模式spline;
• 三次隐式样条插补Hermite-spline (PVT);
• 自动硬件捕捉/触发功能;
• 交互式手动运动;
• 可选择的运动提前预算lookahead。
伺服特性
• 独立的数字PID反馈滤波;
• 速度前馈,加速度前馈,摩擦力前馈;
• 2路陷波滤波器;
• PID参数可随时任意改变;
• 可编程的极限输入,输出;
• 可选择的多级点伺服算法。
换相特性
• 交流伺服电机的正弦换相
• 交流感应电机的矢量控制
• 数字电流环(使用PWM输出时)(只适用PMAC2)
补偿特性
• 位置补偿列表(1D & 2D);
• 力矩补偿列表;
• 反向间隙补偿;
• 刀具半径补偿。
安全特性
• 硬件的和软件的行程极限;
• 放大器使能/报警交换信号;
• 跟随误差警告极限;
• 整合电流极限;
• 编码器计数损失报警(一些版本);
• Watchdog 报警计时器;
• 程序和通信校验。
计算特性
• 实时多任务系统;
• 48位浮点数编程;
• 三角函数和超越函数;
• 自动匹配不同的变量类型。
可以使用的反馈形式
• 数字积分编码器;
• 正弦编码器;
• 旋转变压器;
• 电位计;
• LVDTs,RVDTs;
• 并行数字编码器;
• MLDTs;
• 串行编码器(例如:SSI)。
笛卡儿坐标系或者主/从特色
• 用户自定义的笛卡儿坐标系;
• 可分离运行程序的坐标系;
• 支持多个电机的坐标系;
• 轴空间的转化(例如:坐标系偏置,旋转,镜像);
• 电子齿轮(不需要编程);
• 电子凸轮(需要编程支持)。
运动程序特性
• 高级程序语言;
• 自动按顺序执行运动;
• 使用用户工程单位编程;
• 运动的值可以是公式,也可以是常量;
• 自动匹配坐标系里的各轴,
• 支持G代码,和代码扩展。
PLC程序特性
• 与运动程序异步;
• 与硬件PLC一样控制I/O;
• 脱机运行时,作为支持平台;
• 安全和状态监视;
• 伺服比例行程安排;
• 数据报告功能;
• 可使用控制器的全部寄存器。
所有评论仅代表网友意见,与本站立场无关。