一、外观结构
l 机器人比例协调、造型美观、表面光洁、平整,没有凹痕、划伤、裂缝、变形等缺陷。
l 所有紧固件不得有扭伤、松动等缺陷,金属机壳表面有防锈、防腐蚀涂层,金属零件没有锈蚀。
l 外表面色泽鲜明,无突出颗粒、流柱起泡、失光、剥落等现象。

二、移动与轨道机构
1、行走机构设计方案
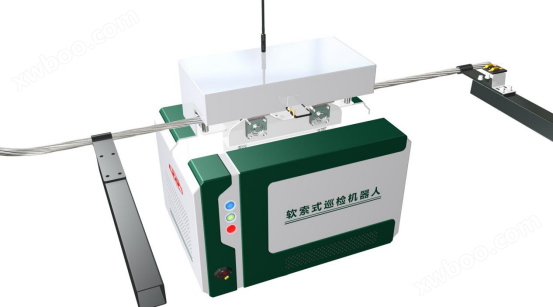
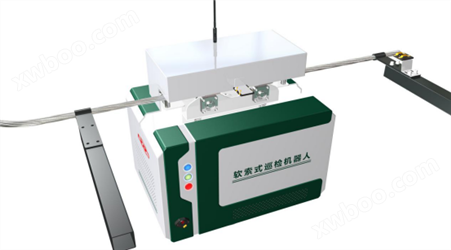
驱动轮、从动轮、轨道夹紧轮均采用U形绳槽曲面,钢丝绳卡接于U形绳槽内。当机器人在轨道上正常行走时,减速电机拖动驱动轮转动,驱动轮+夹紧轮、从动轮+夹紧轮通过与钢丝绳的摩擦力产生前进驱动力,可实现双向行走。
当遇到轨道支架时,驱动轮系产生了障碍。越障凸轮板前端在支架障碍物推动下产生一个向下推力,强迫凸轮板下方的越障伸缩机构被压缩,凸轮板带到夹紧轮向下移动,使驱动轮(前轮)与夹紧轮之间产生一个间距,保证轮副顺利通过障碍点。当轮副通过障碍后,向下的推力解除,夹紧轮在弹簧力的作用下复位,驱动轮(前轮)与夹紧轮落入凸轮板中间凹槽内恢复到正常状态。
当驱动轮(前轮)通过障碍点之后,随后的从动轮(后轮)与夹紧轮之间在支架障碍物推动下产生一个向下推力,从动轮(后轮)与夹紧轮之间产生一个间距,该轮副顺利通过障碍点。前后轮副全部通过障碍点后,行走机构恢复正常状态。
当机器人到达钢索弯道时,行走机构的前后弯道导向轮机构进入工作状态。弯道导向轮同样采用U形绳槽曲面,槽面在弯道导向伸缩机构的预紧力作用下始终与钢丝绳一侧表面贴合。当进入弯道时,前方导向轮在钢丝绳的压力下缓慢向内侧压缩,引导机器人顺利通过弯道。通过弯道后,导向机构恢复正常状态。
过弯道时,前、后方的导向轮同时工作,除了导向作业外,导向机构还具有稳定系统的功能。
2、软索式轨道设计
轨道选用国标GB8918-2006公称直径φ20-6x7圆股钢丝绳,利用使用客户现场原有的中层电缆支架,通过固定在中层电缆支架上的双片钢绳夹板联结固定软索轨道,节省了轨道固定材料,并且不需在隧道体打孔,保障了隧道的安全性。钢丝绳轨引导机器人在隧道一侧中部行走,可使机器人摄像头拍摄到较多的隧道环境。

轨道转弯处采用三组联结副进行支承固定。

l 原材料要求均符合有关国家标准的规定,并具有质量保证书和产品合格证;
l 移动机构设有防冲撞功能或者机构。
l 机器人工作时产生的噪声,在无其他外声干扰的情况下,噪声不大于59.3dB(A)
三、性能特点
l 内置加速传感器,监测机器人的姿态行走动作协调、灵活。
l 控制工作准确可靠,指令与动作协调一致,并可任意选择菜单中的内容。

(系统拓扑图)
l 正常工作时无异常声响。
l 机器人本体宜采用蓄电池(电压直流48V),机器人充电桩电源输入宜采用交流220V/50Hz;并采用纯物理方式实现接触和供电在时间上的分离,不产生火星,以保证隧道环境的供电安全。
l 在钢丝软索轨道上运行的速度应不小于20m/min;
l 重复导航定位误差不大于5mm;
l 轨道型材采用高强度钢丝软索,可以拼接,并且可以根据现场地形设计弯曲度。
三、机器人导航方式与自检
机器人采用软索轨道导航方式。
机器人具备自检功能,自检内容包括电源、驱动、通信和检测设备等部件的工作状态。
四、通信系统
l 智能巡检机器人和中心管理平台通过以太网进行通信。隧道内每隔200米设置一个无线AP,共计布设12个无线AP通信基站,直隧道长距离覆盖,弯曲部分密集覆盖;AP及其干线网络之间采用光纤连接,无线AP和有线网络接口侧采用分组级联方式,而客户端与服务器之间采用普通局域网通讯。
l 通讯模块基于IEEE 802.11b/g技术,具有高带宽、远距离的特点。视频智能巡检机器人所有的控制信号、视频数据、音频数据、现场传感器采集数据及报警信息等均通过mesh无线网络传输。
l 相邻基站交叠覆盖,确保机器人在基站间无缝、无丢包漫游,54M带宽,满足多台机器人720P高清画质海量数据回传,保证隧道内通讯网络无线信号覆盖无盲区。智能巡检机器人不管处在什么位置,通信带宽均不小于6Mbps,同时配合QoS功能。无线控制器控制智能巡检机器人在隧道内各无线AP之间漫游,漫游切换时间不大于100ms,可以保证视频、音频等各类数据实时可靠传输。
五、巡检功能
l 系统支持全自主和遥控巡检模式。
全自主模式包括例行和特巡两种方式。例行方式下,系统根据预先设定的时间、周期、路线等参数信息,自主启动并完成巡视任务;特巡方式由操作人员选定巡视内容并手动启动巡视,机器人可自主完成巡检任务。
遥控巡检模式由操作人员手动遥控机器人,完成巡视工作。

智能巡检机器人依靠搭载的星光摄像头、红外热像仪、微气象监测模块组(H2S、CO、CH4等气体监测模块)等设备,可实现不间断地对隧道进行自主往返巡检、异常点自主定位复检、手动控制复检、手动灾害处理等功能。并实现对隧道状态的连续、动态的数据采集及系统存储。
云台安装在智能巡检机器人底部,云台内可搭载可见光相机、红外热成像相机和补光设备。云台水平方向具备360°转动能力,垂直方向具备±90°转动能力,同时配合相机变焦,可有效保证对智能巡检机器人30米内各方向现场细节进行有效监控;同时云台自带减震装置,配合一体化防抖相机机芯,在智能巡检机器人运行过程中可减小振动,大大提高视频观测稳定度和可观测性;云台内搭载一体化可见光相机用于隧道现场观测,可清楚看到30米内物体的细节;同时具备防抖动功能,对5-15Hz的振动有明显抑制作用;另外相机自带耀斑消除功能,对于隧道内部照明灯引起的耀斑,有明显抑制作用。
云台内搭载红外线热成像相机,主要用于隧道内电缆、电缆接头、接地箱、配电箱等设备的热监控。对比测温光纤,智能巡检机器人车载热成像具有测温范围广、无需预布、可移动、可观察性强等特点,对故障预警和分析有一定优势,可以作为测温光纤的补充和冗余备份设备。对于部分重点监视设备或单次监视设备,机器人将执行特定点测温任务。巡检机器人行驶至设备附近,对该设备进行重点监测,同时采集该设备的可见光视频与红外温度图像,并做出温度状态分析,对于设备异常将即时予以报警。
除可见光与红外线摄像机外,云台内还搭载LED补光灯和预热装置,以保证在低照度和低温下相机的成像效果及使用寿命,LED补光灯功率为12W,有效补光距离不小于30米。


所有评论仅代表网友意见,与本站立场无关。