
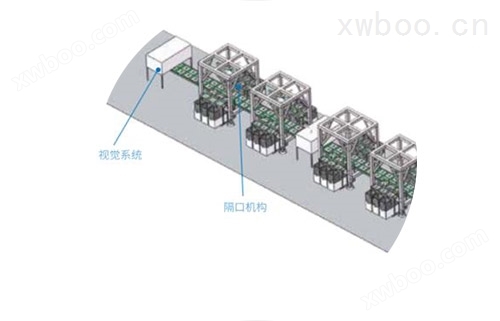
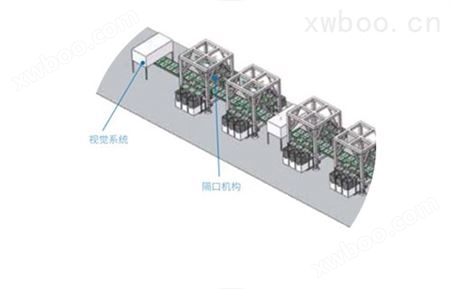
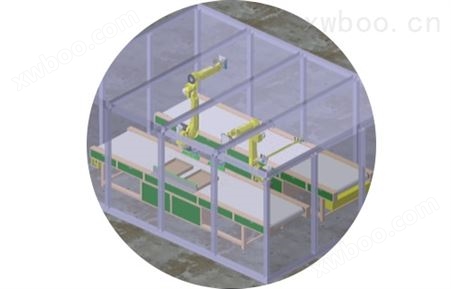
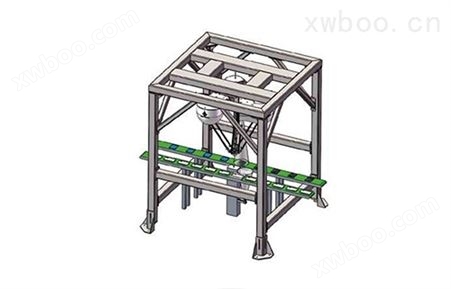
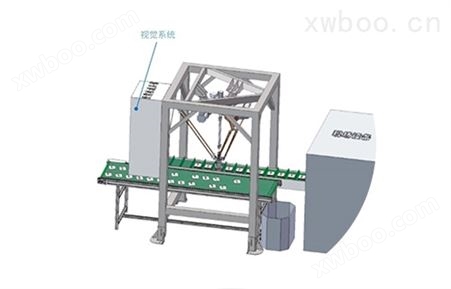
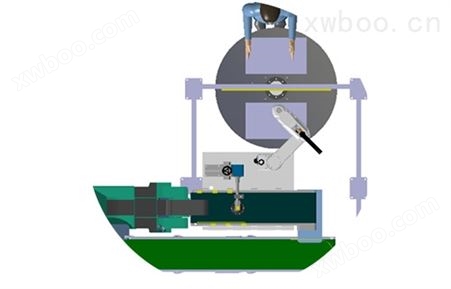
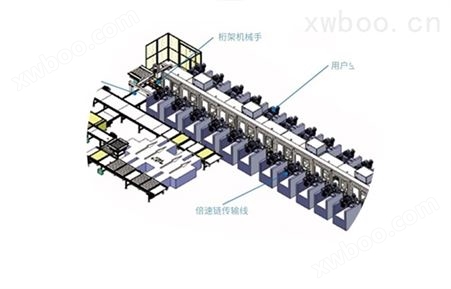
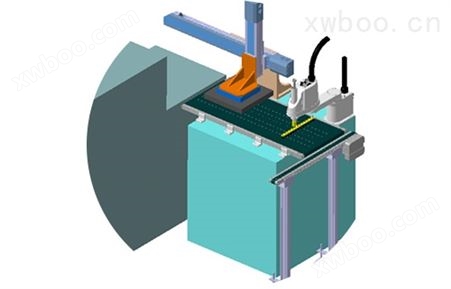
整个流程的区域分为视觉检测区、分拣 A、B、C 区。每个分拣区配有 2 台勃肯特并联四轴机器人,每台机器人拾取范围内摆放 6 个隔口机构和 12 个代表不同区的收集编织袋,文件袋无重叠来料,经传送带至视觉系统进行位姿及条型码识别, 机器人依据其信息拾取相对应区域的文件袋,放置于隔口机构,****终滑放至相应区域的收集袋中,隔口机构旁传感器检测文件袋编织袋装满,则发出指令移走。该流程共涉及 6 台勃肯特四轴并联机器人,可按文件袋数量分别投入使用。
| 实施后成果 | 数据 |
| 减少人力 | 14人 |
| 效率增长 | 60% |
| 生产节拍 | 180个/分钟 |
| 不合格率 | 0% |
| 占地面积 | 25㎡ |
| 投资回收期 | 2.5年 |
本应用方案可广泛用于快递、物流、袋装品、盒装品等领域的分拣环节。




所有评论仅代表网友意见,与本站立场无关。