


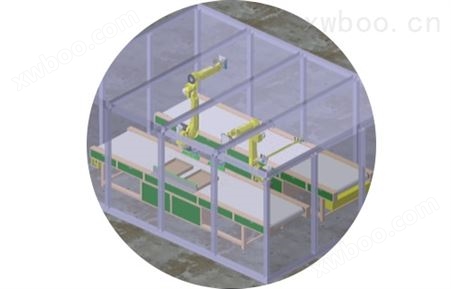
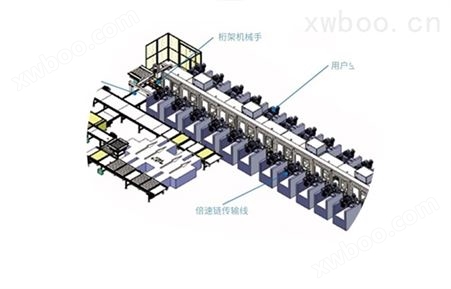
现场有4位工人将位姿各异的塑料灌装瓶拾取,竖直放置于沙拉酱灌装机的进料载具内,以方便完成后续灌装工艺。由于前端人工操作效率直接影响整条产线产能,因此客户投产机器人自动化生产线,使整个灌装生产连续且稳定。

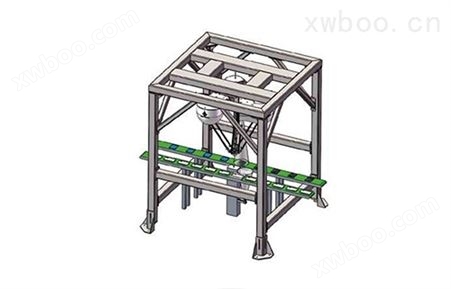
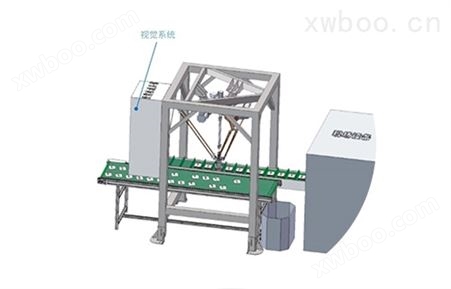
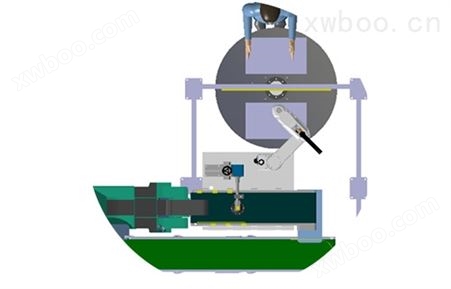
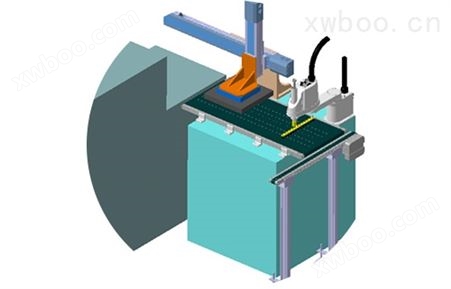
此案例中,现场来料位姿随机的塑料瓶,首先送至视觉系统工位进行位姿检测,勃肯特串并混联机器人根据视觉识别信息,调整末端执行器拾取塑料瓶并旋转四轴、五轴将位姿调整为竖直方向,根据辨别灌装机的进料载具速度,快速插入载具内。
| 实施后成果 | 数据 |
| 减少人力 | 4 |
| 效率增长 | 67% |
| 生产节拍 | 60个/分钟 |
| 不合格率 | 0% |
| 占地面积 | 2㎡ |
| 投资回收期 | 2年 |
该应用非常广泛的应用于食品、饮料、药品、化学品等一系列领域中。南京睿易智能科技有限公司可根据客户需求,量身定制。




所有评论仅代表网友意见,与本站立场无关。